Zespołowe Projekty Studenckie w Makerspace@UW
W ramach przestrzeni Makerspace@UW można zrealizować Zespołowe Projekty Studenckie. Udostępniamy zarówno miejsce do działania, dobrze wyposażone pracownie: elektroniczną, obróbki drewna, komputerową i druku 3D jak i zapewniamy warsztaty techniczne powiązane z pracowniami. Dysponujemy szeroką oferta urządzeń jak i materiałów, z których można korzystać. Jesteśmy również otwarci na nowe zapotrzebowania na urządzenia, materiały i szkolenia.
Zapraszamy do kontaktu na adres mailowy makerspace@uw.edu.pl w celu skonsultowania projektu z zespołem Makerspace. Pomożemy w znalezieniu opiekuna, ustaleniu budżetu na materiały oraz harmonogramu projektu.
Więcej informacji o Zespołowych Projektach Studenckich jest dostępne pod tym linkiem.
Projekty realizowane w Makerspace@UW
Warsztat eksperymentów
Nabór do projektu trwa!
Szukamy chętnych osób do współpracy w nowym projekcie (możliwość zaliczenia przedmiotu ZPS I lub II) mającym za zadanie opracowanie
doświadczeń z zakresu fizyki/chemii dla szkół lub dla młodzieży szkolnej do samodzielnego przygotowania w domu. Doświadczenia muszą być ciekawe, twórcze, pokazujące w praktyce treści omawiane w szkole. Dodatkowo muszą również być bezpieczne oraz tanie w przygotowaniu.
Zarys projektu przygotowany jest dla 2 grup:
- I grupa przygotowuje zestaw doświadczalny dla szkół, który zaprezentuje w
jednej ze szkól (szkoła podstawowa klasa 7-8, bądź liceum), wraz z opisem jak
dokładnie taki zestaw przygotować i przeprowadzić doświadczenie. W
zależności od pomysłu i realizacji, możliwość przygotowania kilku zestawów
gotowych do sprzedaży. - II grupa przygotowuje zestaw doświadczeń dla młodzieży do samodzielnej
realizacji w domu. Doświadczenia będą skierowane do uzdolnionej młodzieży i
czytelników czasopisma „Delta”. W przypadku przygotowania większej ilości
doświadczeń przez jedną grupę, bądź sumarycznie przez kilka kolejnych grup,
doświadczenia te mogą zostać opublikowane w czasopiśmie „Delta” jako seria
artykułów.
W obu grupach możliwość nagrywania części opisowej w formie filmu – podstawą jest jednak opis słowny.
opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2025/2026
Konkurs robotów Robo-sumo
Kolejnym konkursem jakie zrealizowaliśmy był konkurs robotów Robo-sumo w którym to drużyny budowały roboty przystosowane do zsunięcia robota przeciwnika na dohyo. Każdy robot było oddzielnym projektem a w konkursie wzięło udział 8 zespołów od 3 do 5 osób.
Raport – Robot sportowy kategorii sumo
Raport – Robotics Laws Breakers
Galeria
opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2022/2023
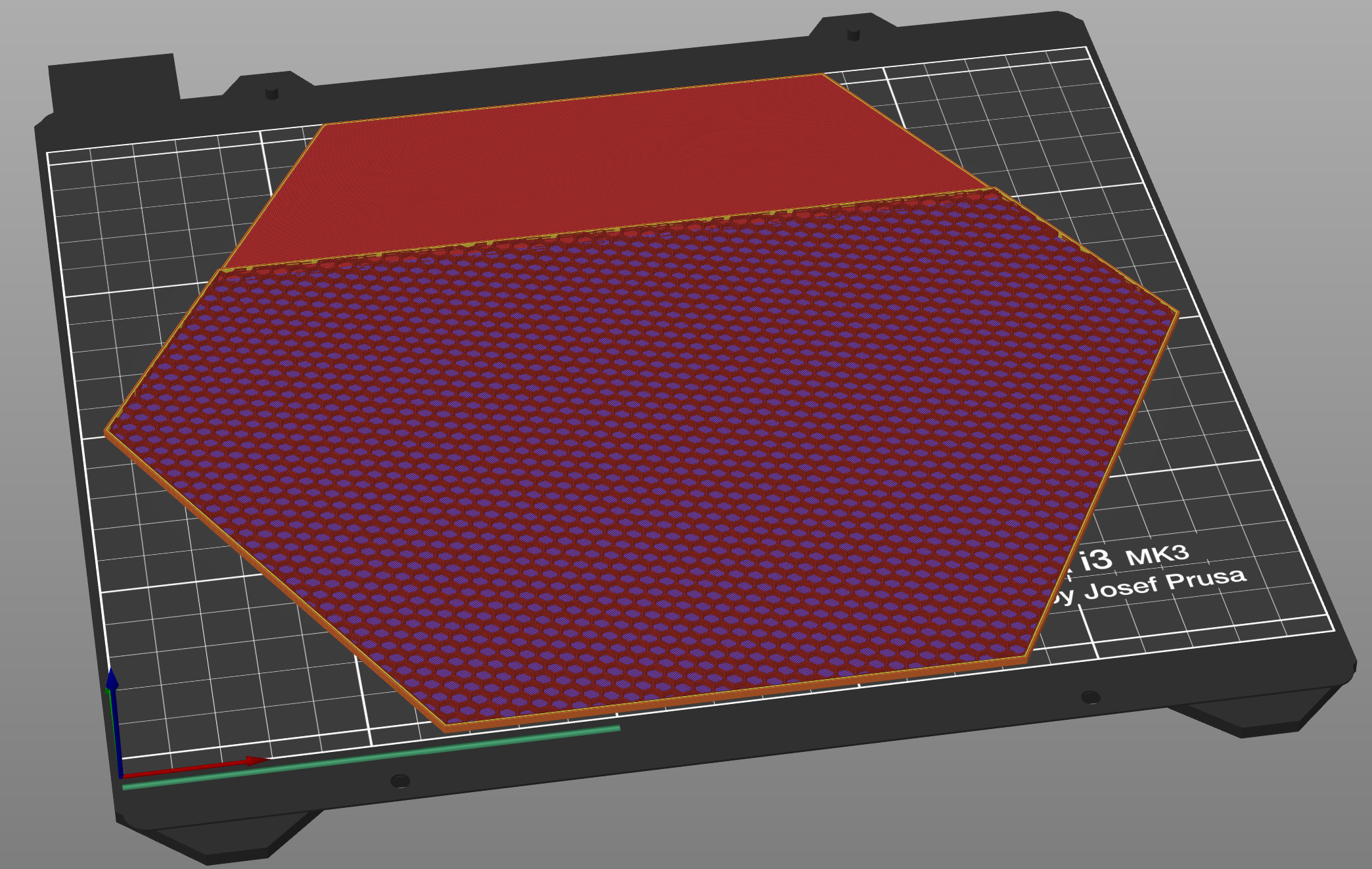
Druk 3D – wizualizacja wpływu parametrów
Projekt zakończony sukcesem!
Projekt powstał z założeniem prezentowania studentkom i studentom wpływu pewnych istotnych parametrów przygotowywania plików do wydruku FDM/FFF na jakość wydruku, jego masę oraz czas wykonania w przystępny i wizualnie przyjazny sposób.
Galeria


opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr letni 2021/22, grupa nr 10
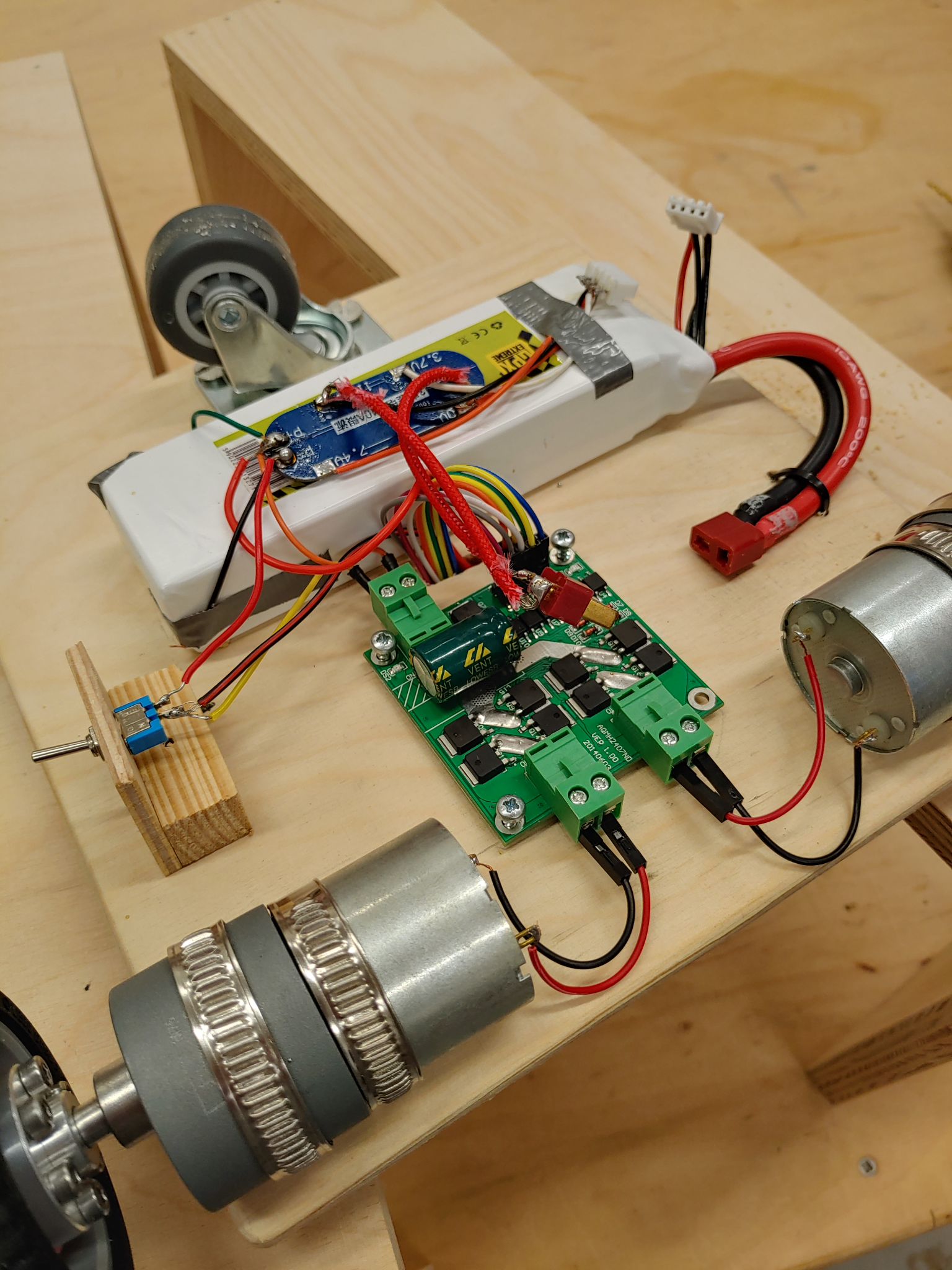
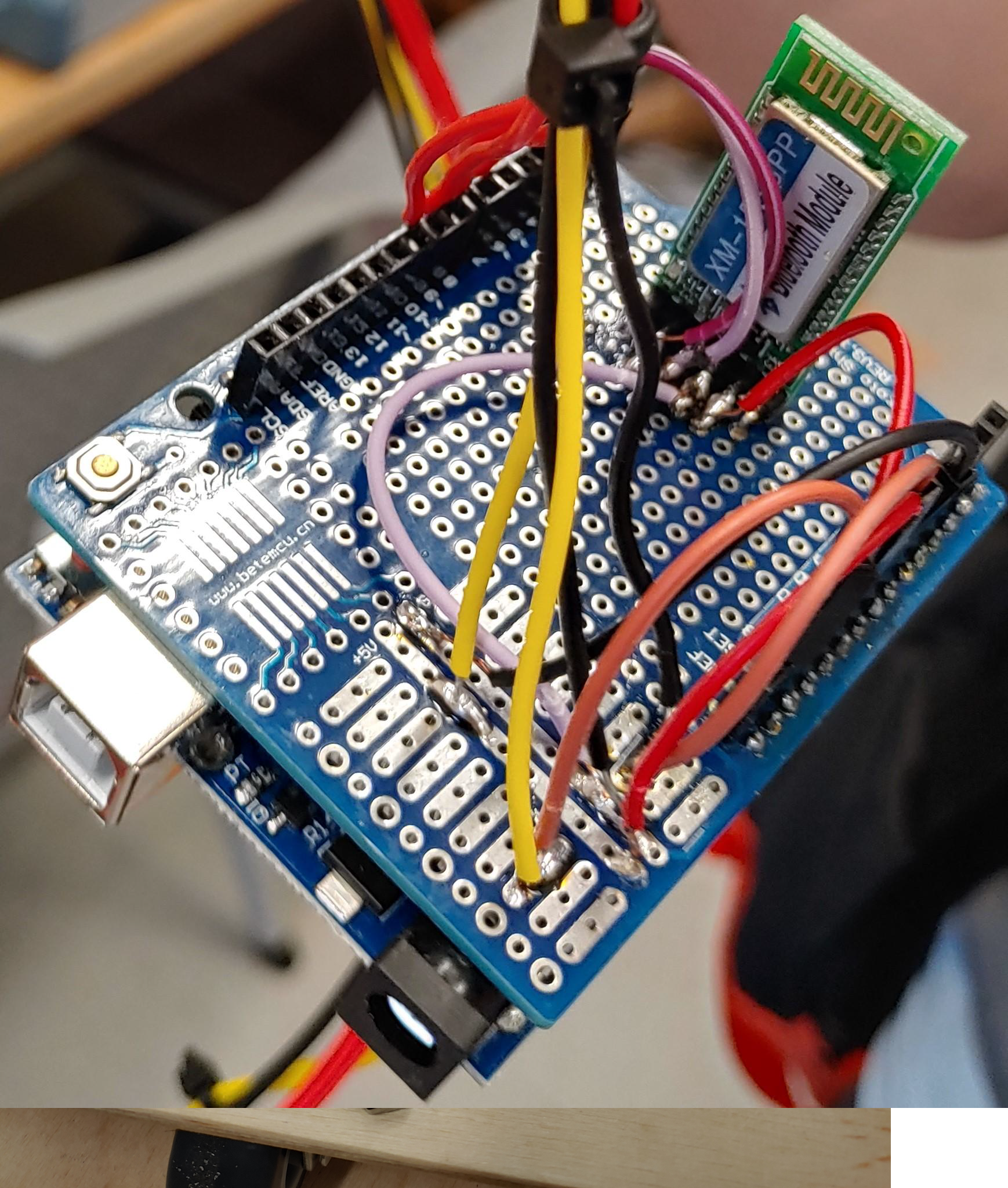
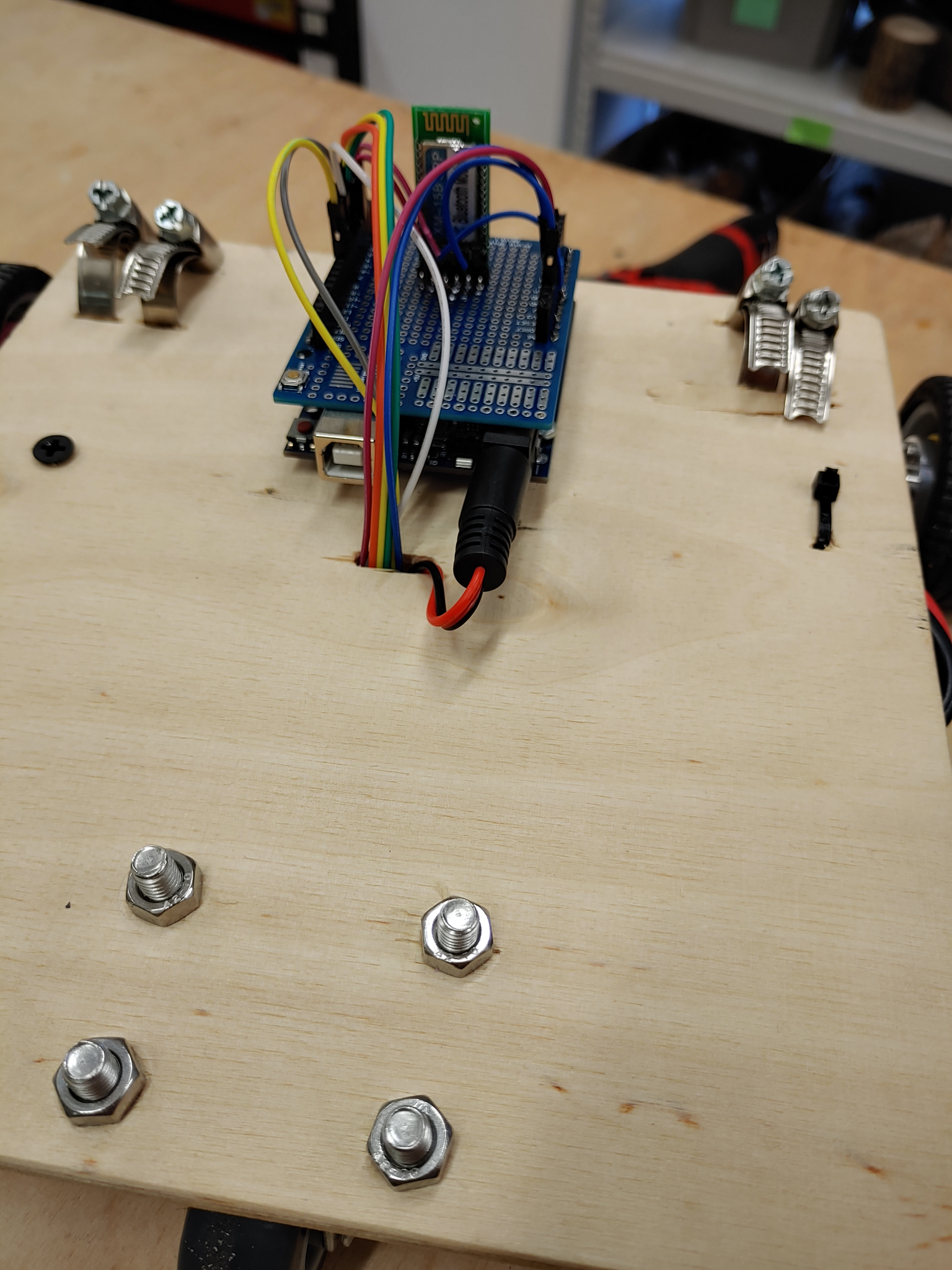
Robot sterowany zdalnie
Projekt zakończony sukcesem!
Celem obranego projektu było zaprojektowanie robota sterowanego zdalnie z wykorzystaniem komunikacji Bluetooth i sterowania w postaci zestawu czujników odbiciowych działających w obszarze podczerwieni umożliwiającego kontrolę nad poruszaniem się robota przez szklaną, przezroczystą przeszkodę.
Galeria
opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2021/2022
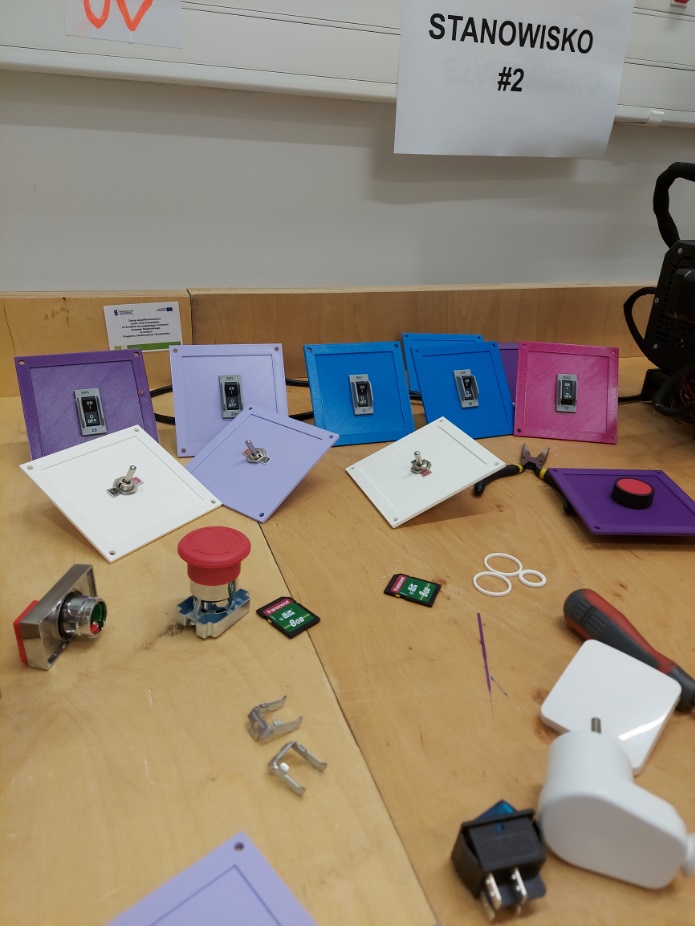
Kokpit symulacyjny do manipulatora Łazika Marsjańskiego
Projekt zakończony sukcesem!
Celem tego projektu było wykonanie funkcjonalnego kokpitu symulacyjnego dla łazika marsjańskiego Wydziału Fizyki UW, zawierającego różne rodzaje przycisków, przełączników i gniazdek. Dostęp do takiego panelu pozwoliłby Zespołowi Łazika Marsjańskiego na regularne ćwiczenia i zdobywanie nowych umiejętności w tej konkurencji.
Galeria


opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2019/2020
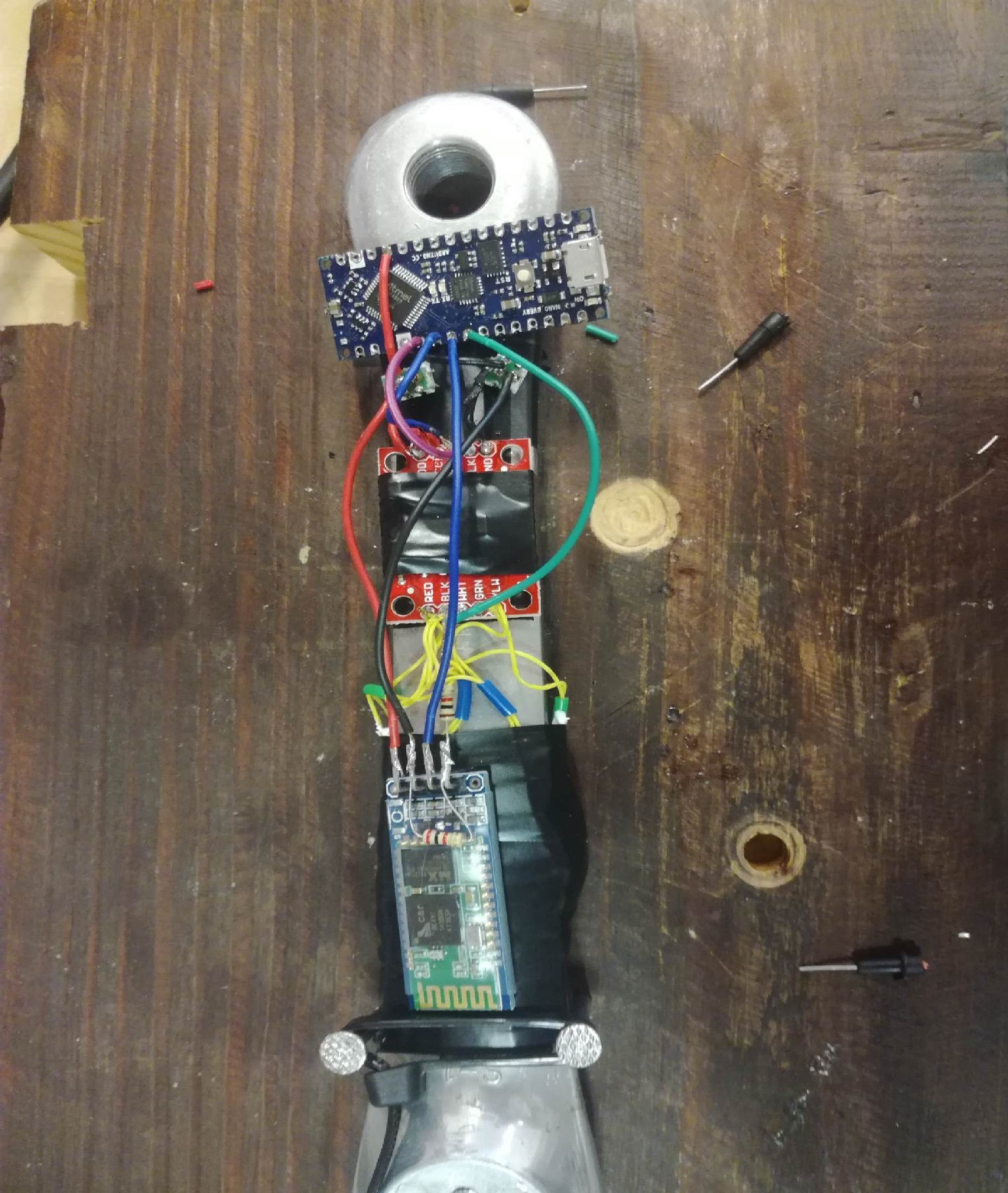
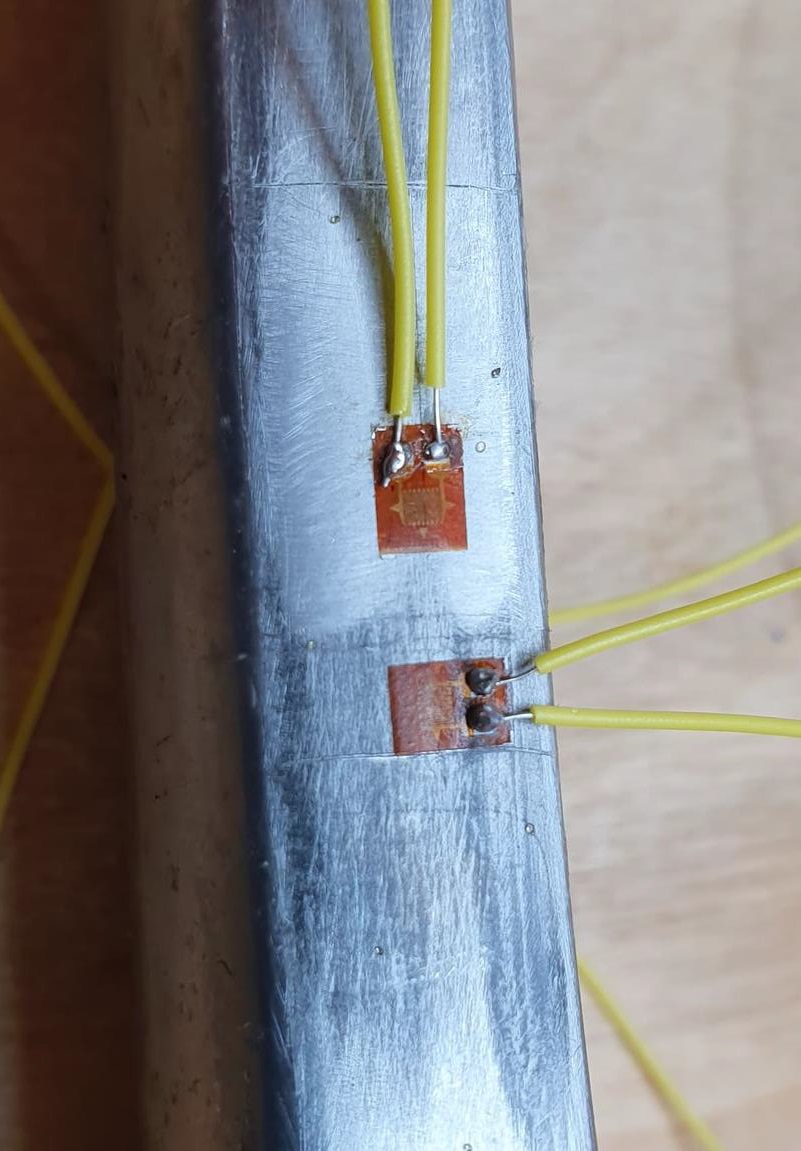
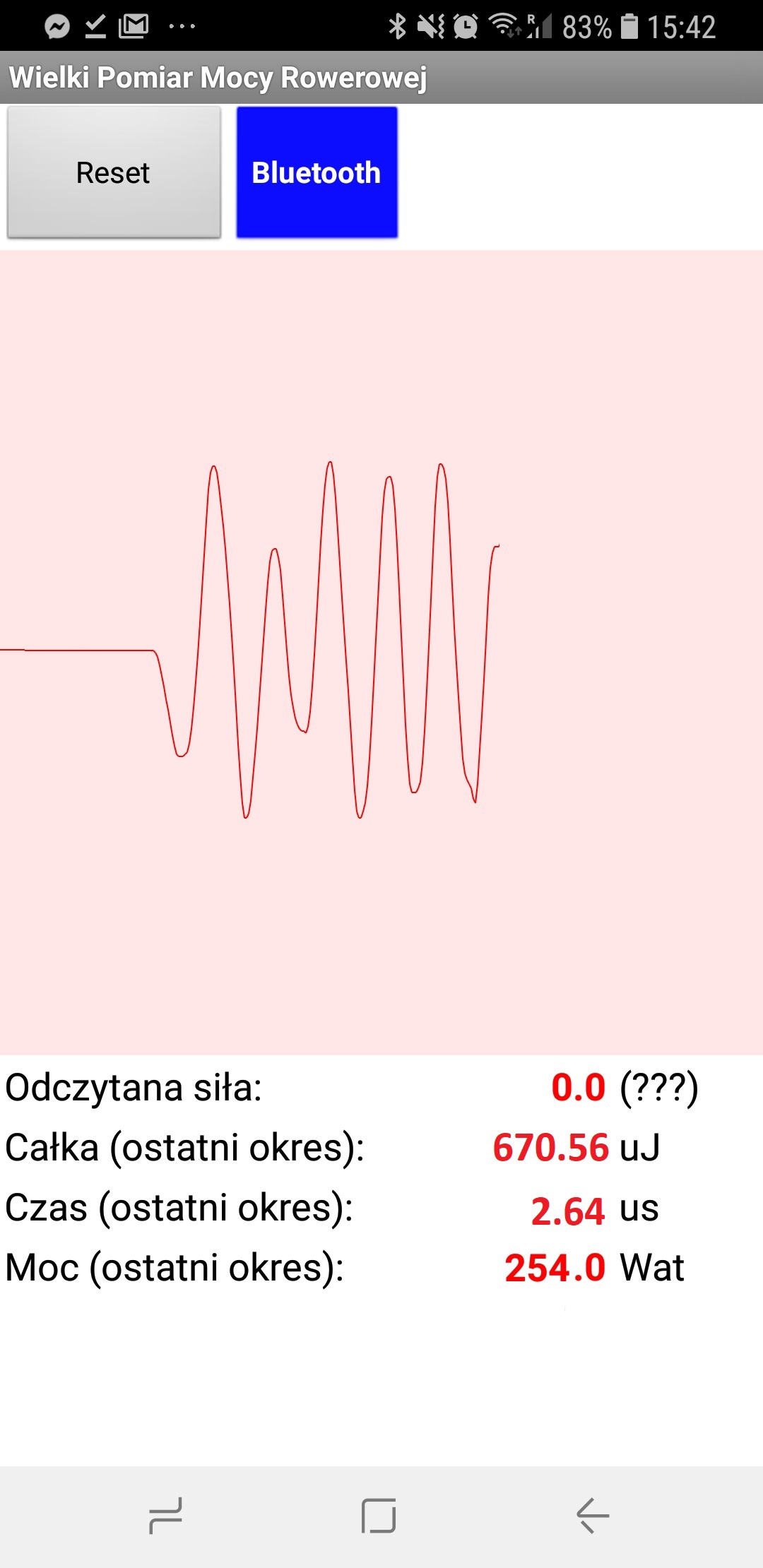
Kolarski pomiar mocy
Projekt zakończony sukcesem!
Celem projektu było zbudowanie urządzenia, zintegrowanego z rowerem, które potrafiłoby zmierzyć moc z jaką pedałuje kolarz. Działanie urządzenia miało polegać na zmierzeniu niewielkich ugięć korby rowerowej występujących podczas pedałowania za pomocą zespołu tensometrów.
Galeria

opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2019/2020
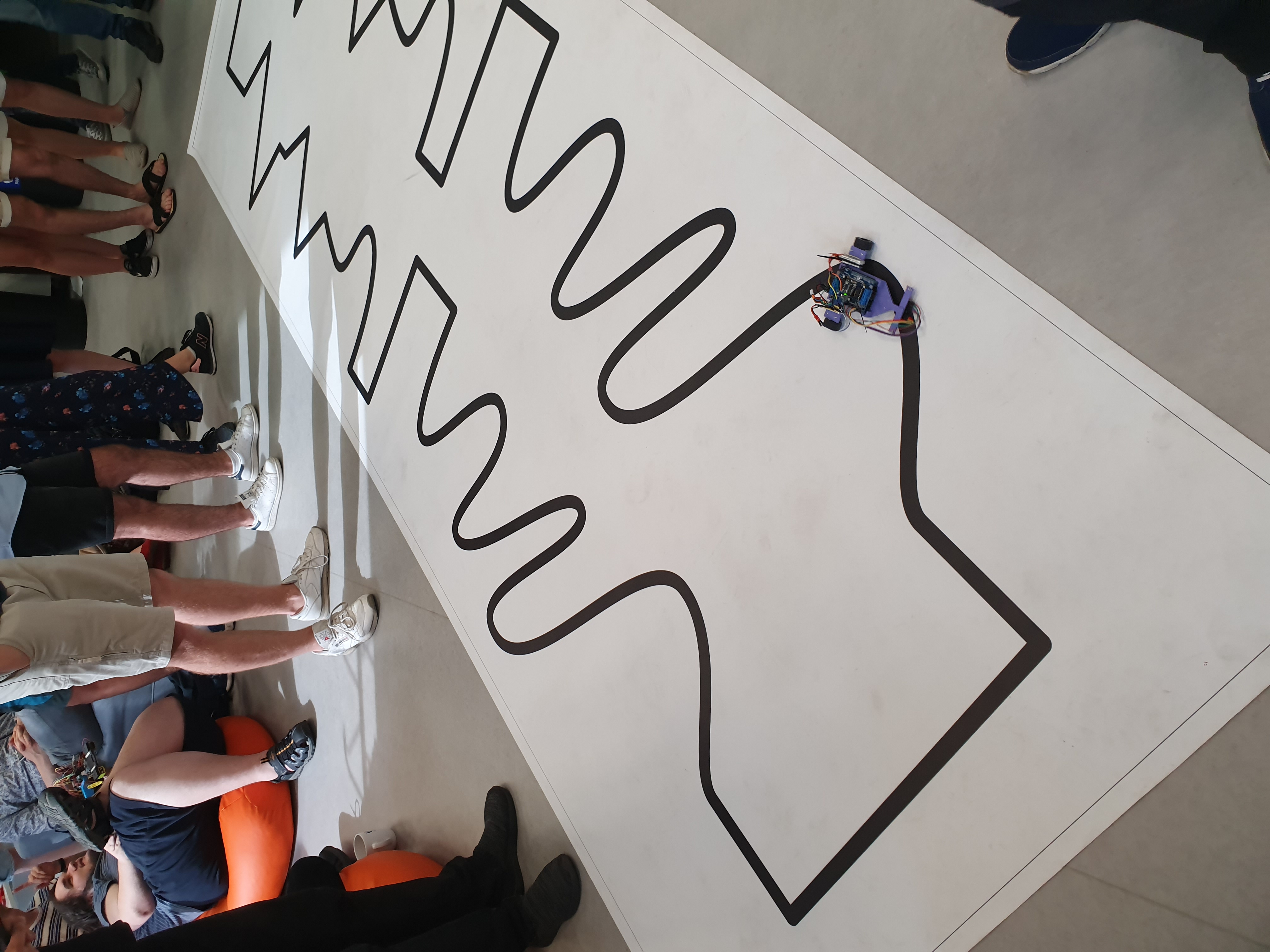
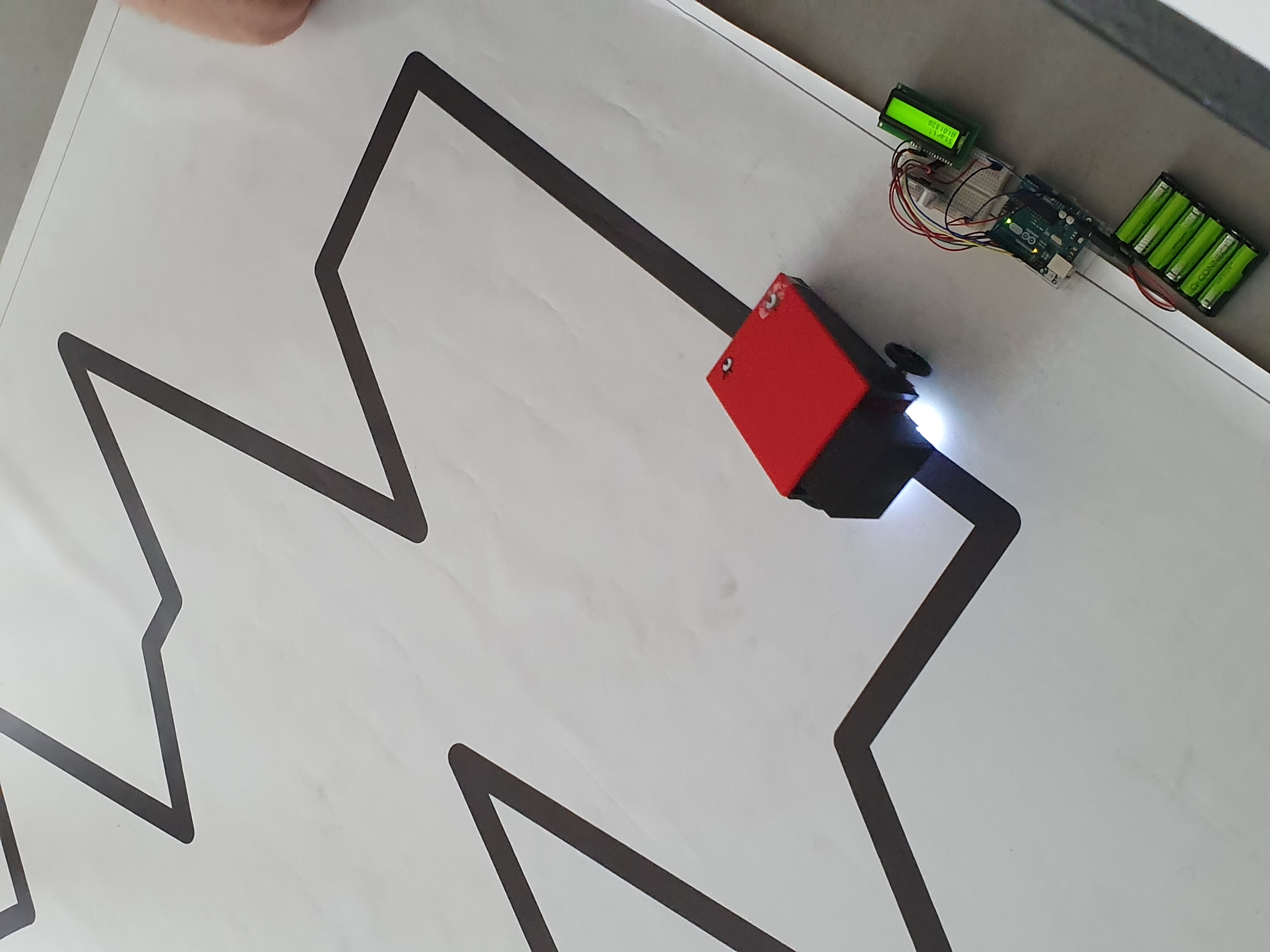
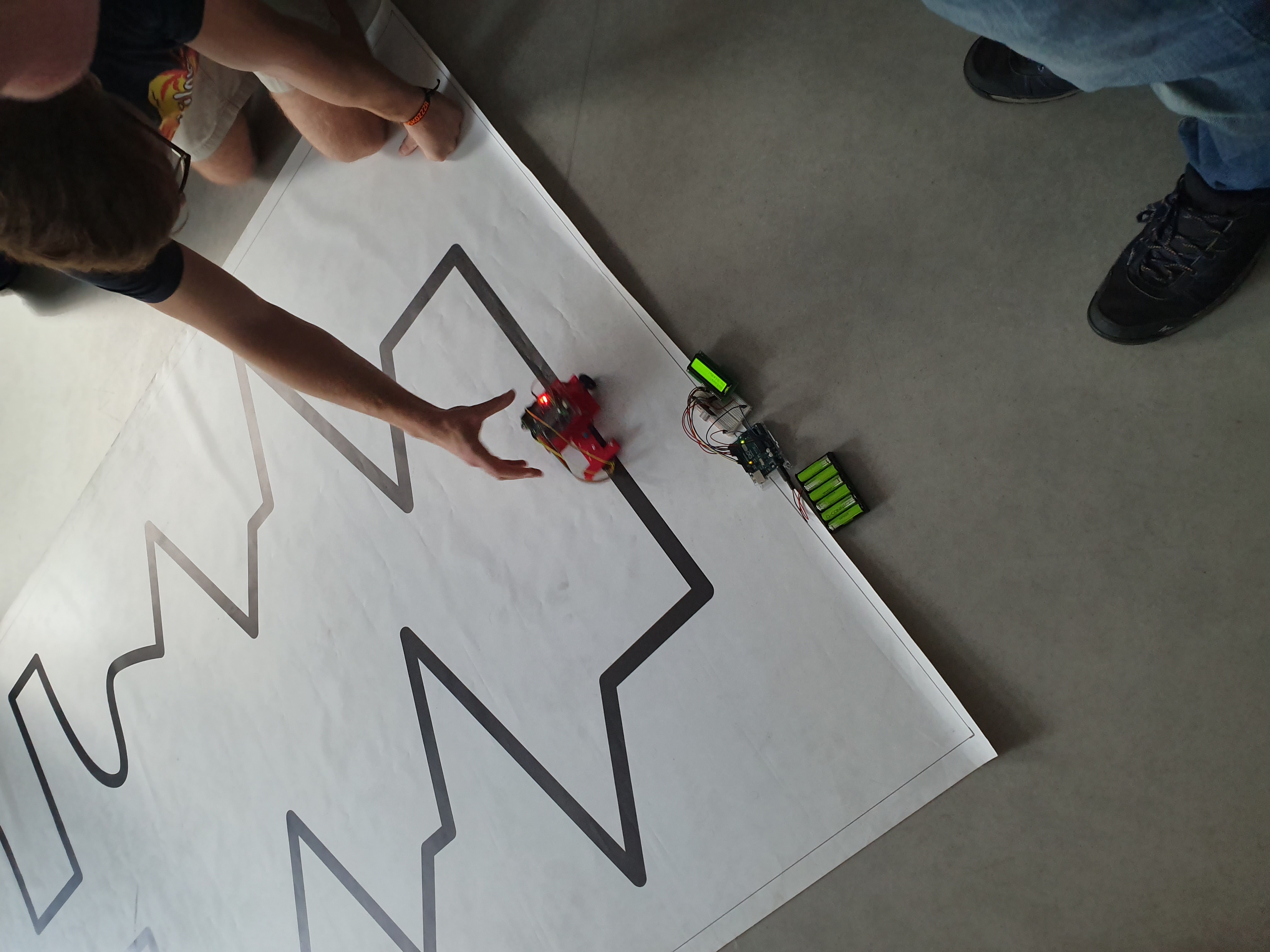
Konkurs robotów linefollower
Projekty zakończony sukcesem!
W zespołowych projektów studenckich zorganizowaliśmy pierwszy konkurs w którym to drużyny budowały robota zdolnego do autonomicznego pokonania trasy wytyczonej czarną linią na białym tle. Każdy robot był oddzielnym projektem. W konkursie wzięło udział 8 zespołów od 3 do 5 osób.
Raport – Centralny Bar Mleczny
Galeria




opiekun: mgr Piotr Kaźmierczak, Piotr.Kazmierczak@fuw.edu.pl
semestr zimowy 2018/2019
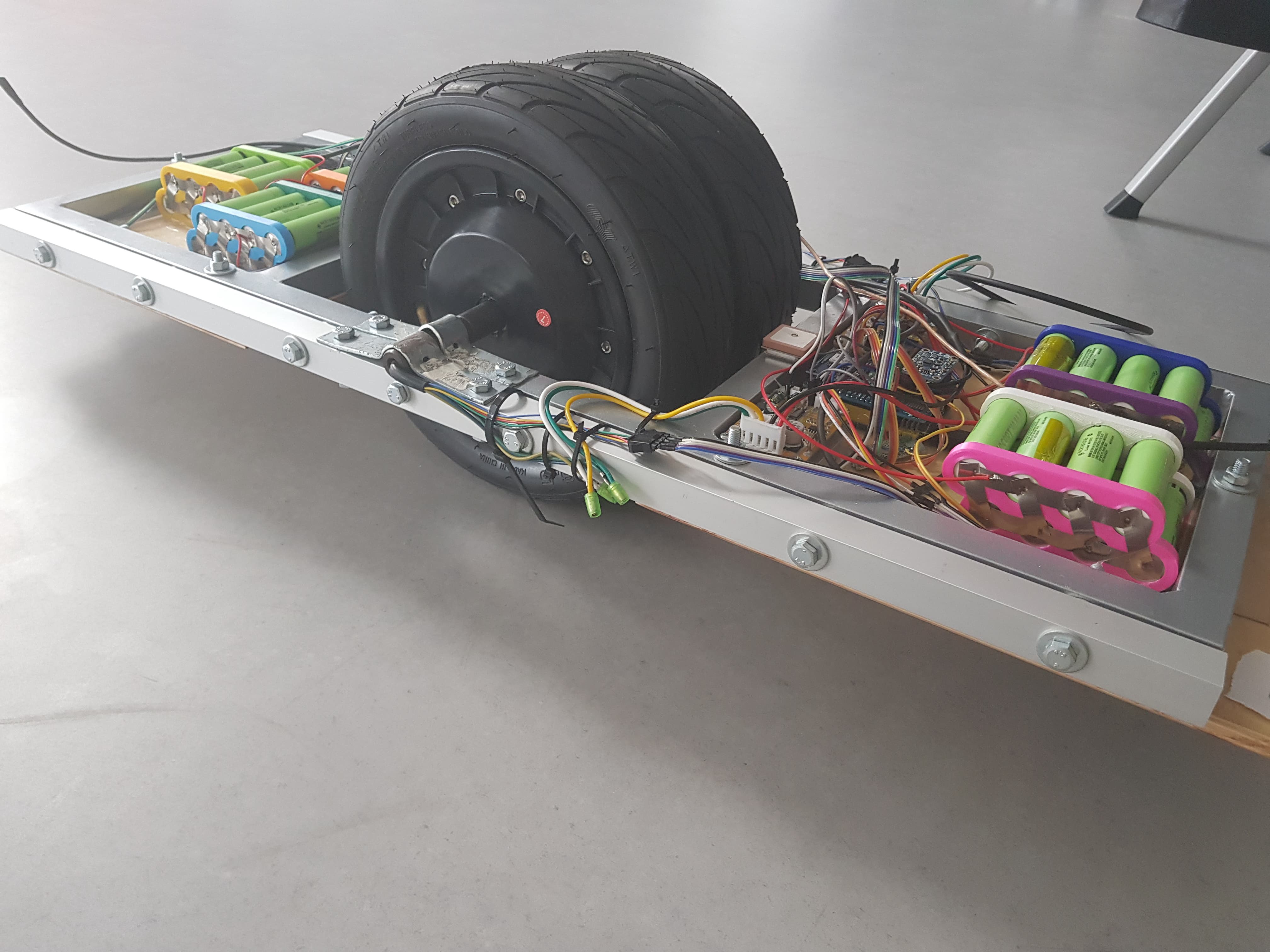
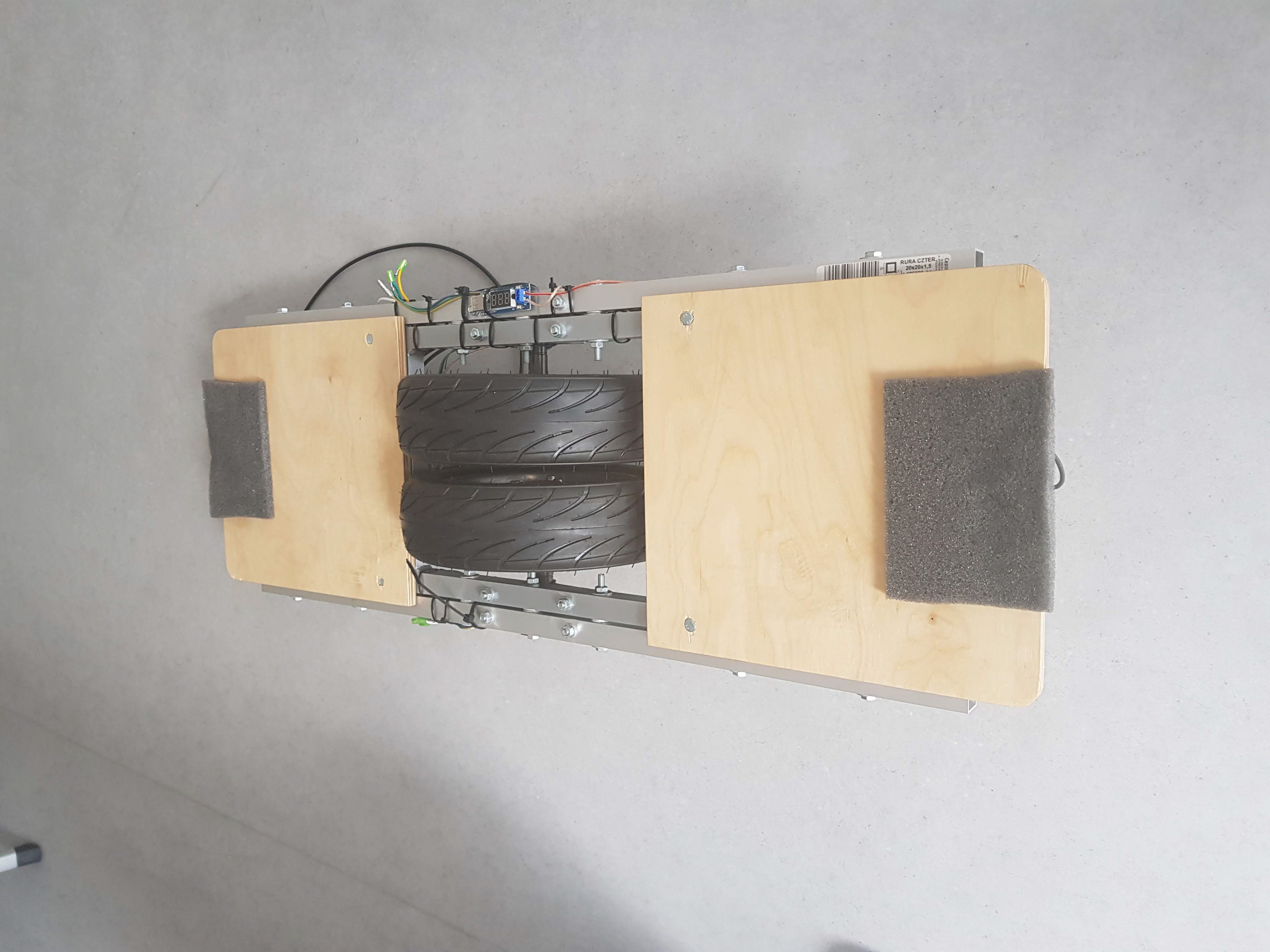
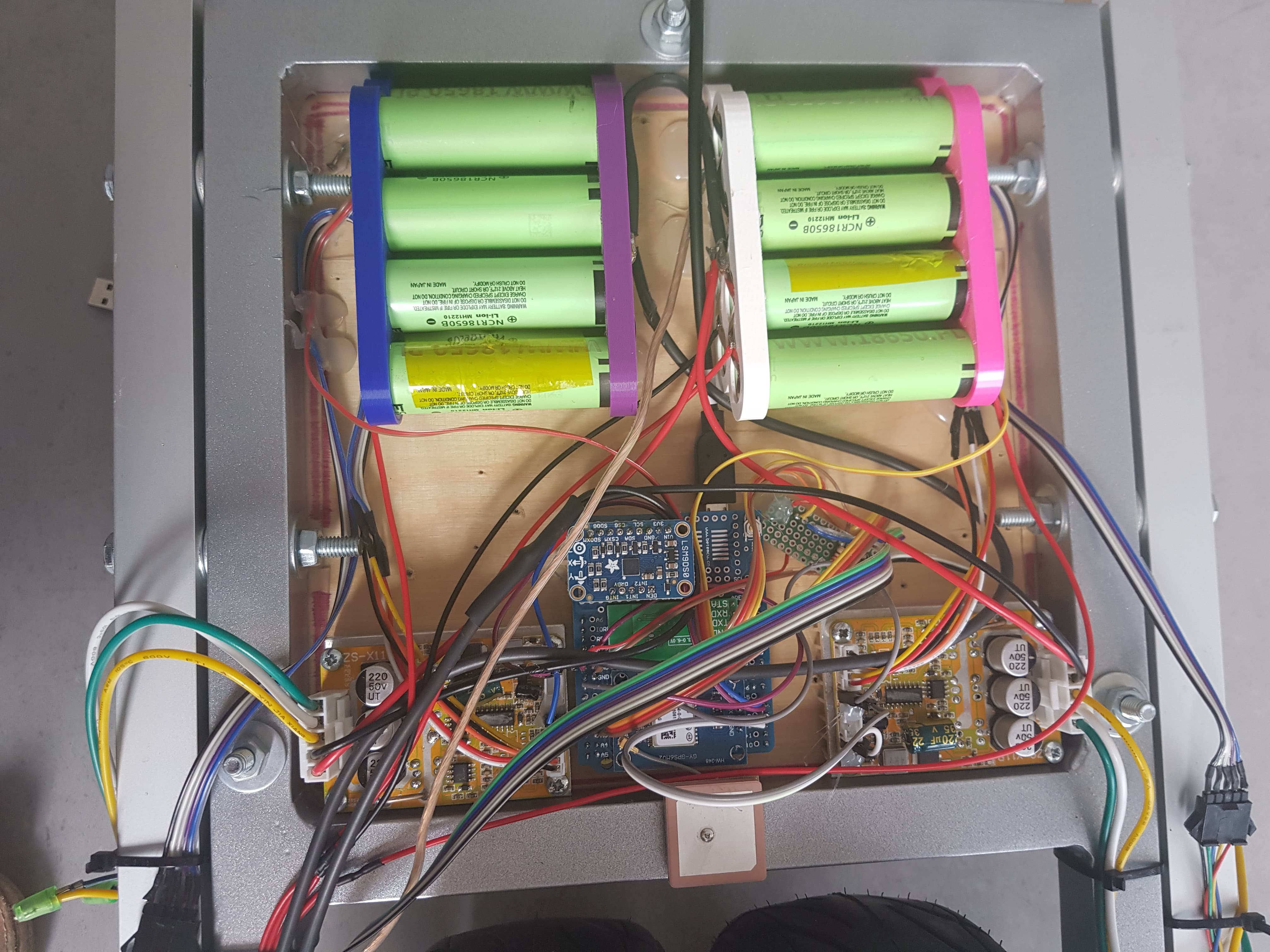
Samobalansująca się deska elektryczna z jednym kołem – zrób to sam!
Projekt zakończony sukcesem!
Projekt ma na celu zbudowanie elektrycznej, samo-balansującej się deski z centralnie umieszczonym kołem. Jazda na takiej desce polega na wytrącaniu jej z położenia równowagi, na co reaguje silnik elektryczny. Starając się ową równowagę przywrócić, deska nabiera prędkości. Projekt wymaga opracowania układu jezdnego wraz z elektroniką, zasilaniem oraz skonstruowanie platformy, na której może stanąć człowiek.
Galeria
Projektowanie i drukowanie elementów zastępczych do maszyny typu flowpack
Projekt zakończony sukcesem!
Celem projektu jest dokładne zwymiarowanie istniejących elementów urządzenia, zaprojektowanie ich w dowolnym programie, a następnie ich wydruk na drukarkach 3D. Części pochodzą z maszyny pakującej wykorzystywanej w fabrykach firmy komercyjnej. W czasie projektu zaplanowana jest wizyta w fabryce w celu zobaczenia środowiska pracy danego elementu. Projekt realizowany w przestrzeni Makerspace@UW.
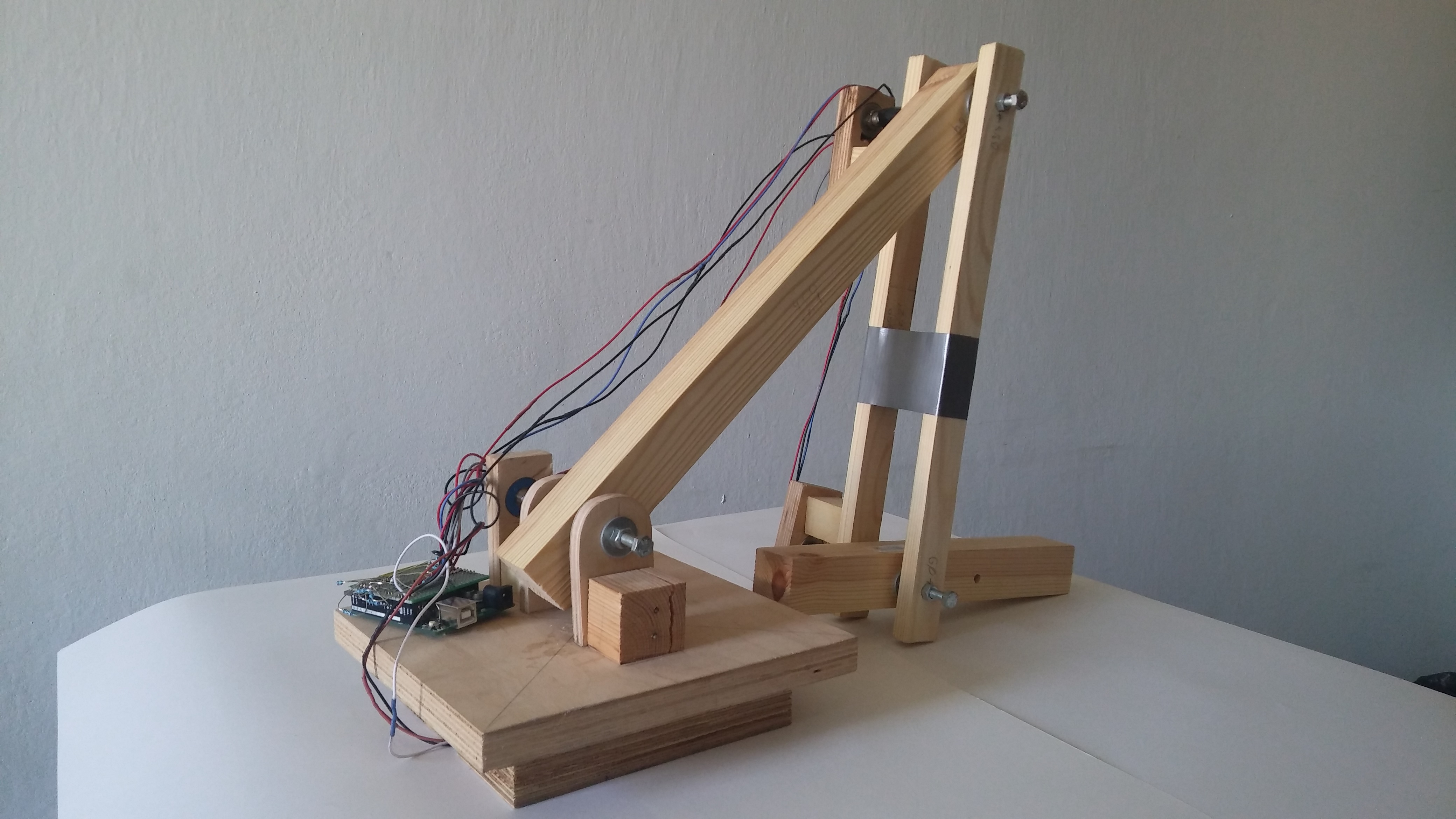
Budowa systemu Master-Slave robotycznego ramienia łazika marsjańskiego
Projekt zakończony sukcesem!
Celem projektu jest stworzenie systemu sterowania ramieniem robotycznym w układzie master-slave. Na podstawie istniejącego, funkcjonalnego ramienia robotycznego należy zaprojektować i wykonać (przede wszystkim korzystając z druku 3D) jego pomniejszoną replikę, zamontować na niej enkodery obrotowe, a następnie podłączyć je do Arduino i zaprogramować całość tak, aby funkcjonowała jako niestandardowy joystick. Stworzone mini-ramię zostanie wykorzystane przez Zespół Łazika Marsjańskiego UW do sterowania ramieniem łazika w układzie master-slave, tj. pozycja mini-ramienia będzie zadawała docelowe położenie dla ramienia zamontowanego na łaziku.
Galeria
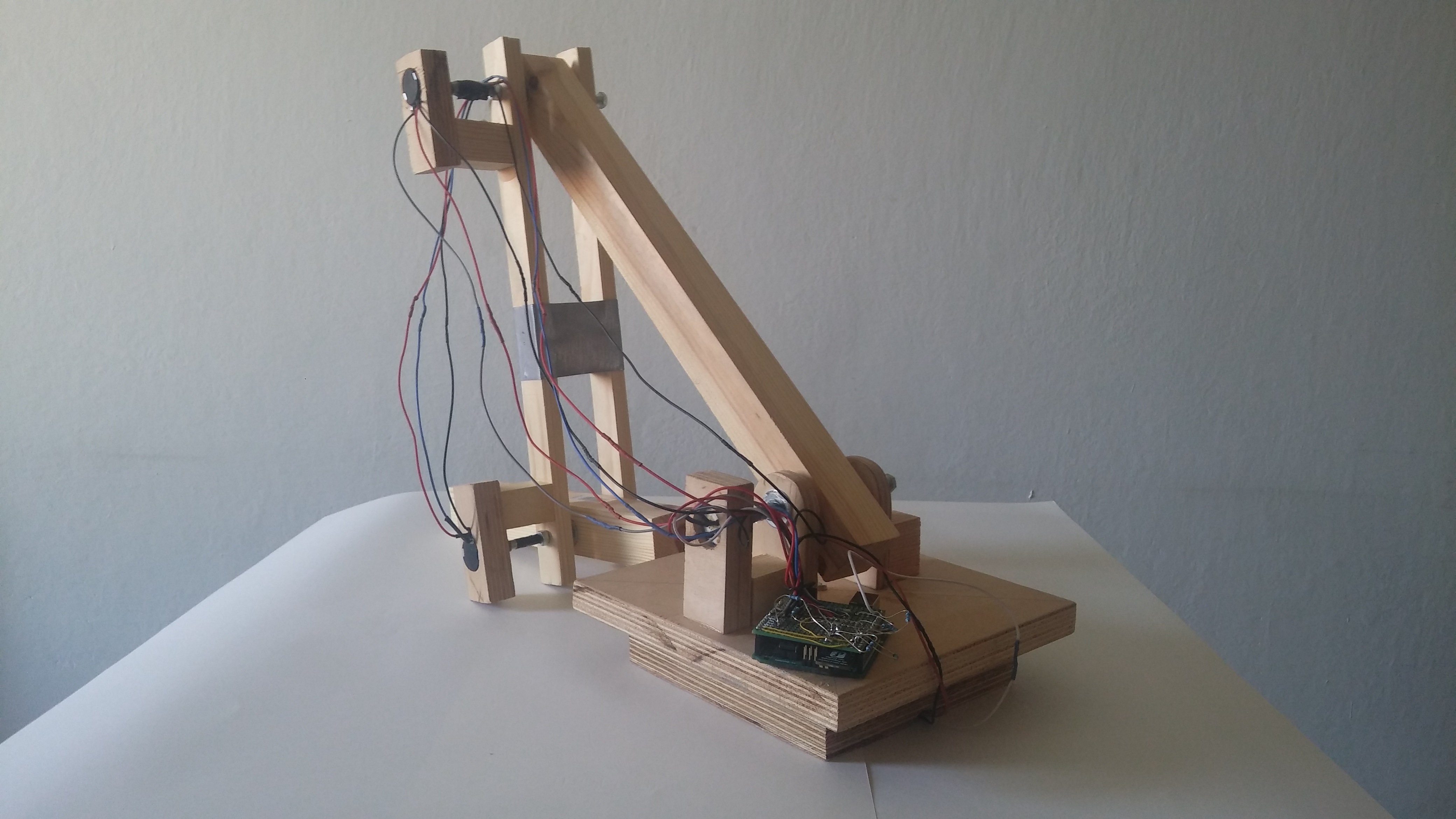
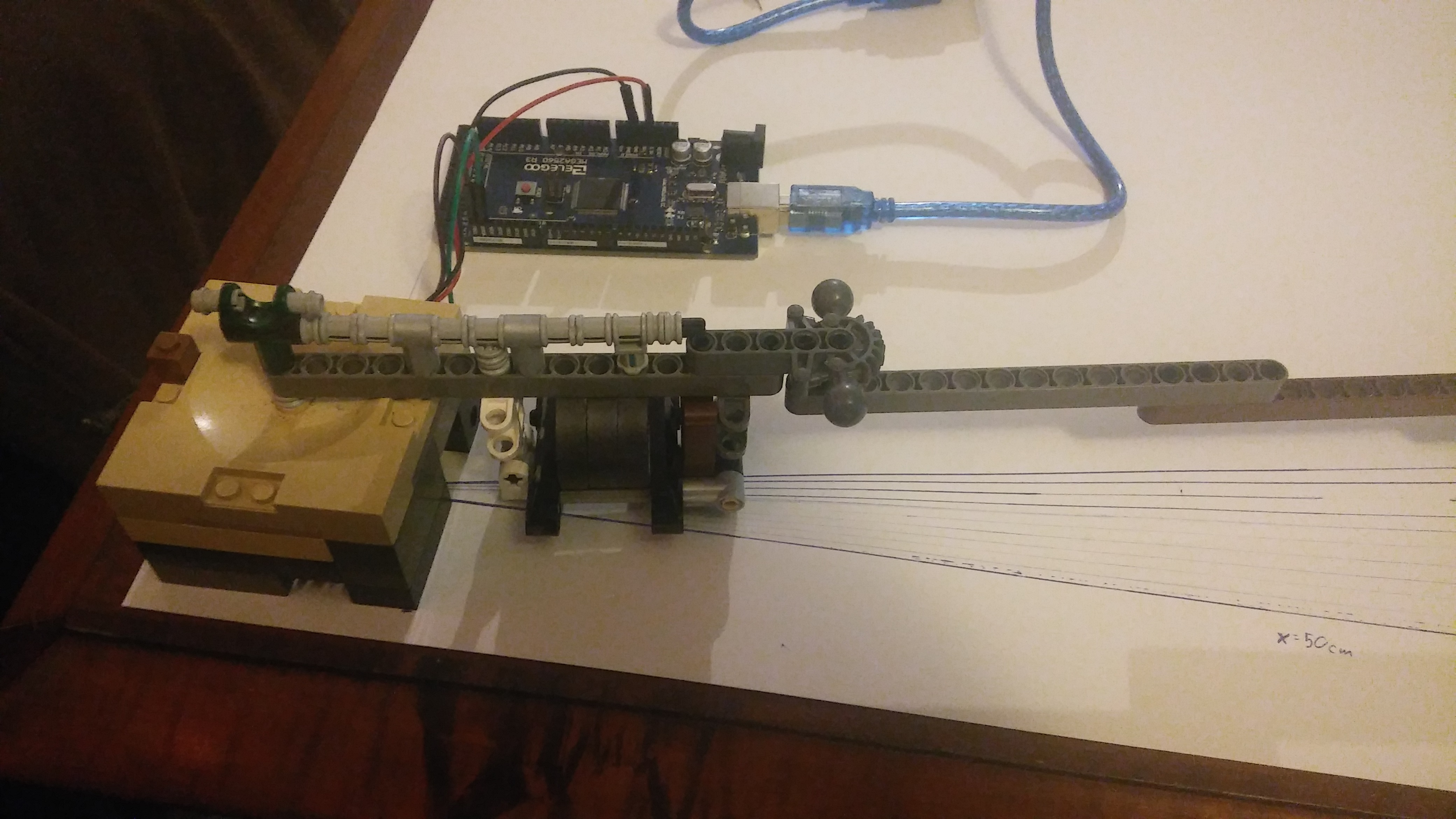
Railgun – budowa i badanie możliwości
Projekt zakończony sukcesem!
Projekt ma na celu zbudowanie prototypu railguna – działa elektromagnetycznego. W ramach projektu zostanie ono poddane badaniom balistycznym oraz próbie zoptymalizowania parametrów jego pracy. Przy użyciu szybkiej kamery zostaną prześledzone tory ruchu pocisków w powietrzu i wodzie.
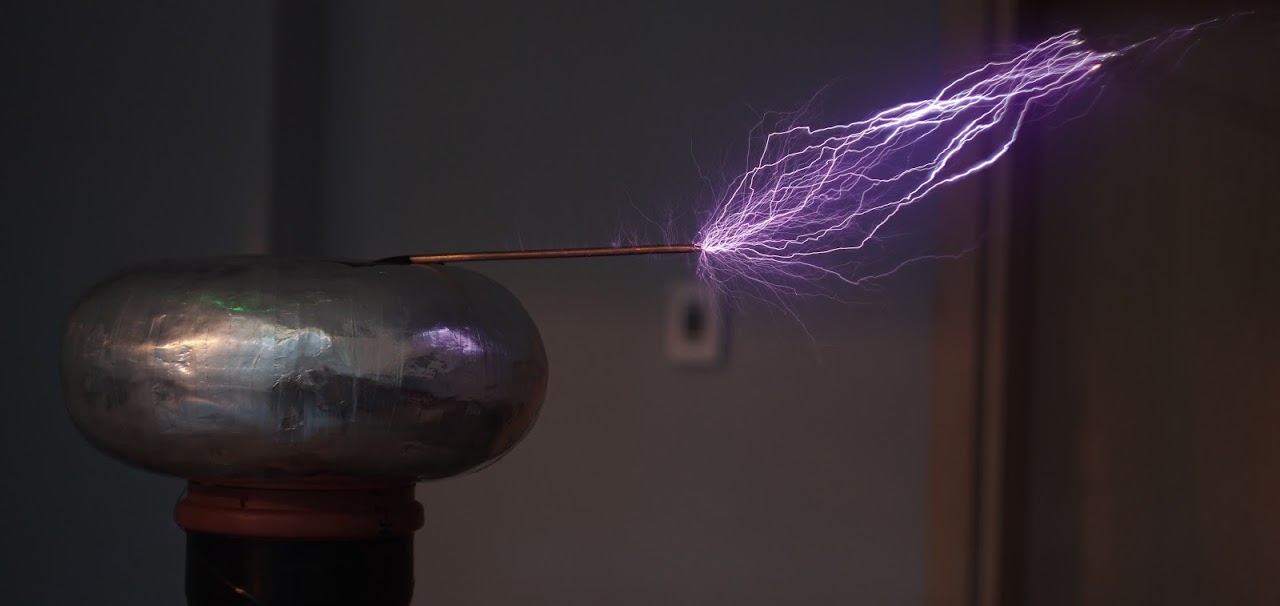
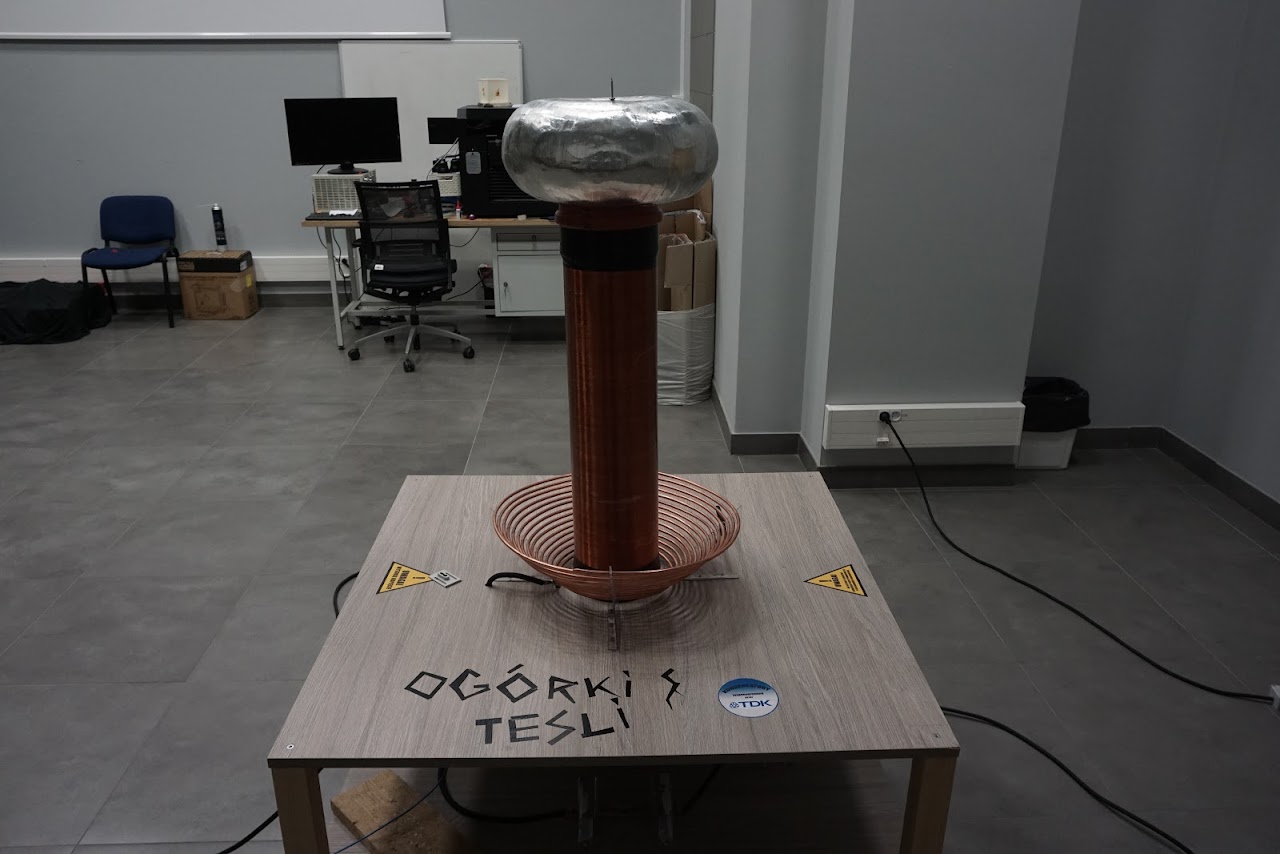
Generator Tesli
Projekt zakończony sukcesem!
Celem projektu jest wytworzenie generatora Tesli w celu podarowania go Pracowni Pokazów Wykładowych
Galeria


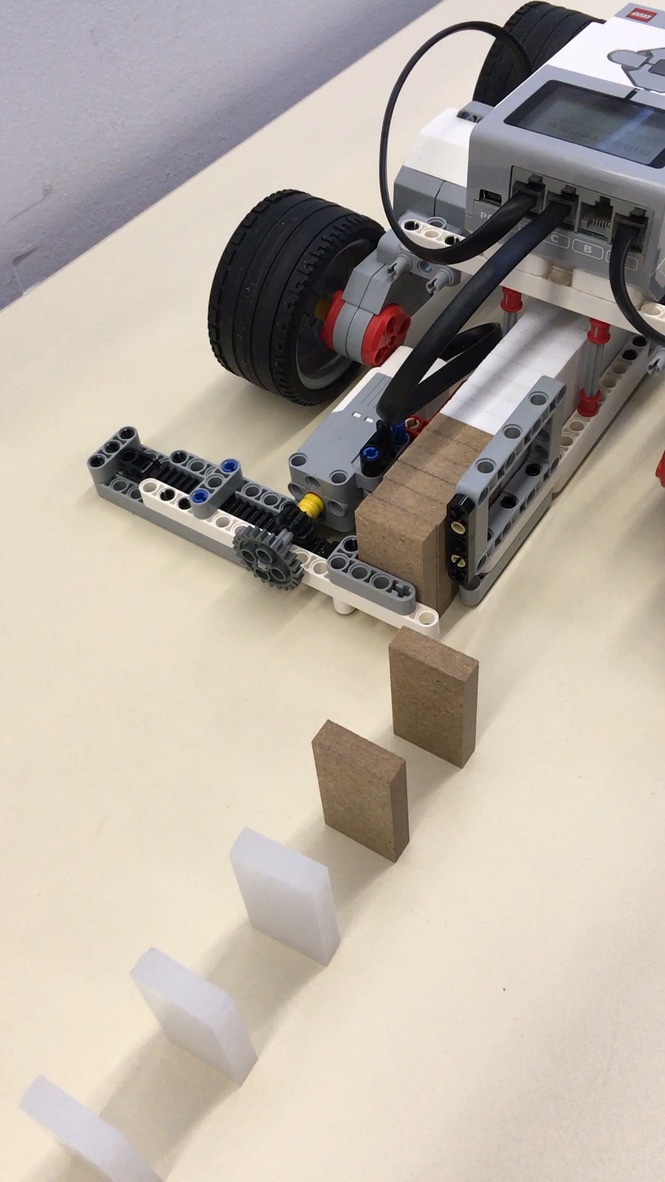
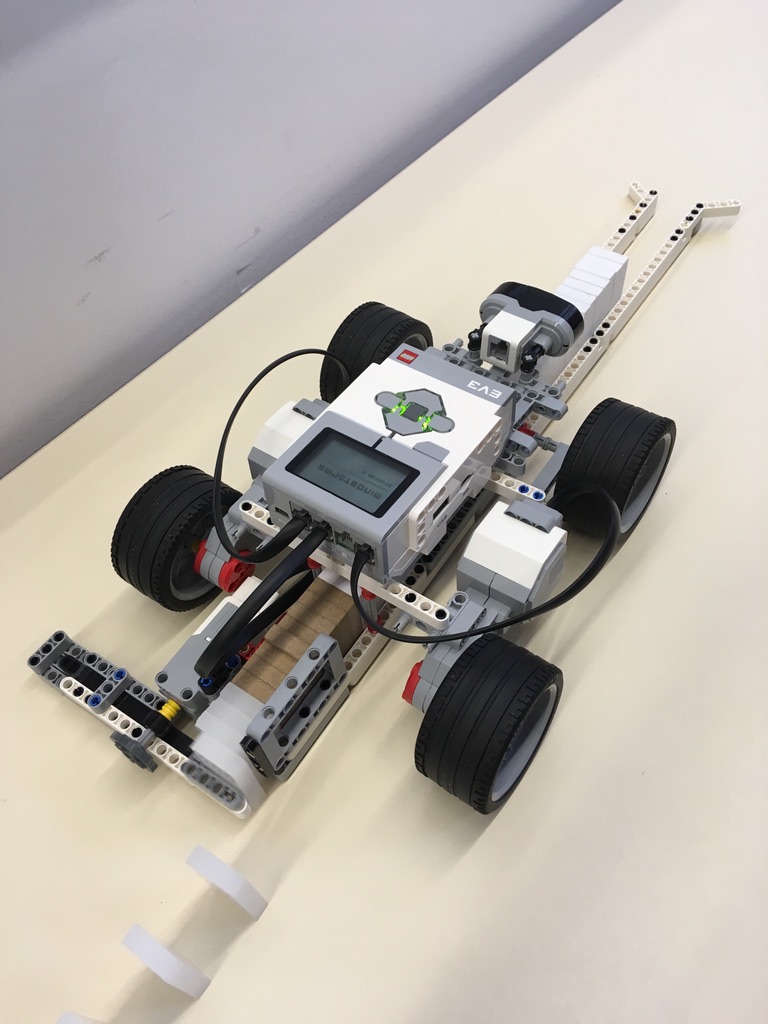
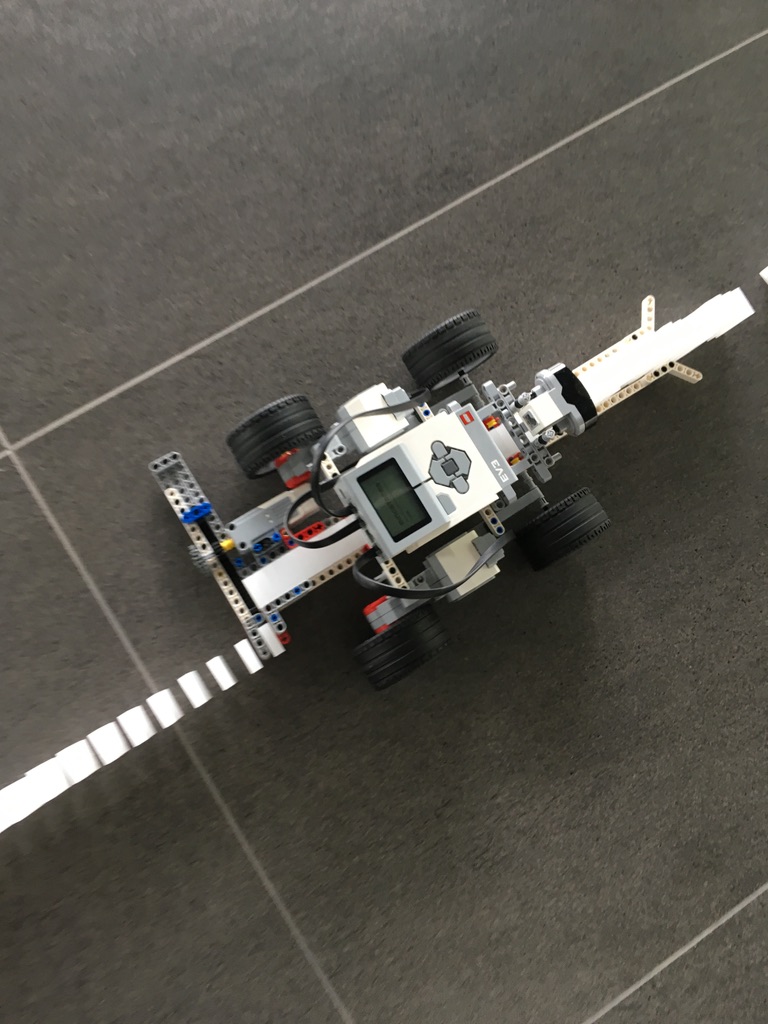
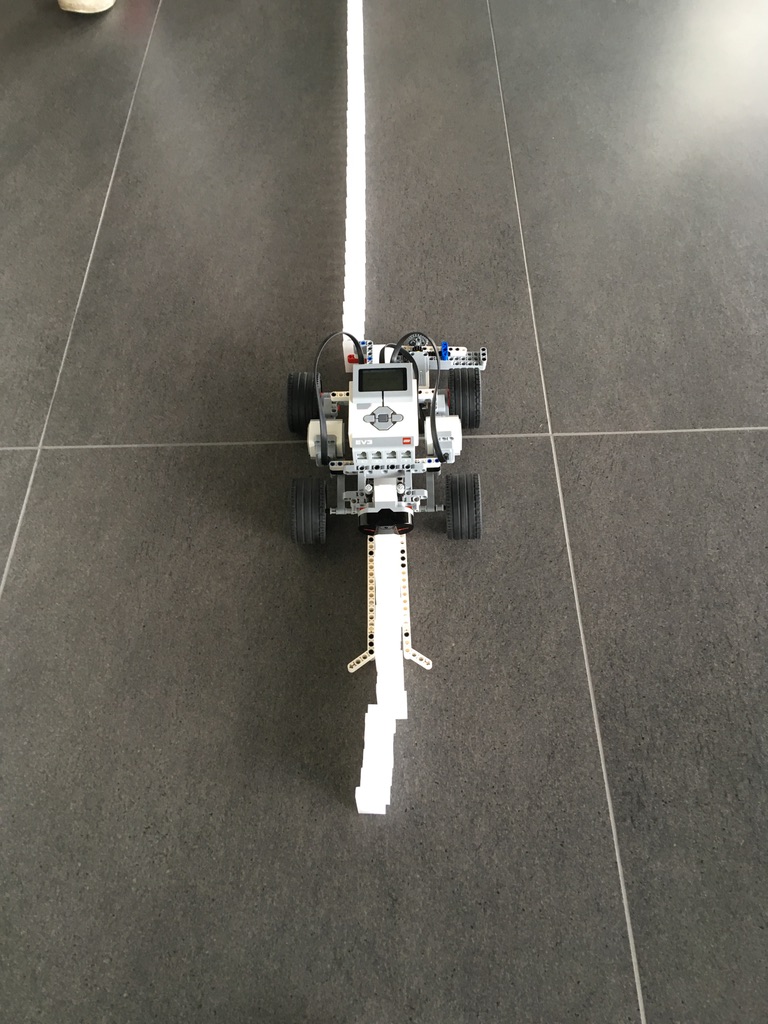
Zautomatyzowane ustawianie kostek domina
Projekt zakończony sukcesem!
Celem projektu było stworzenie pół zautomatyzowanej platformy badającej fluktuacje
przewracających się klocków domino.